Ajuste del tacómetro.En esta placa se ha incluido la posibilidad de conectar un sensor de pulsos, para medir la velocidad de la máquina.
En las explicaciones del proyecto, se ha dicho que en el software incluido en el micro-controlador ARM Cortex M4, existe un estimador de la velocidad, que hace innecesario el uso de un tacómetro para la regulación del par y la velocidad de la máquina.
Entonces ¿por qué ahora hablamos de usar un sensor para medir la velocidad?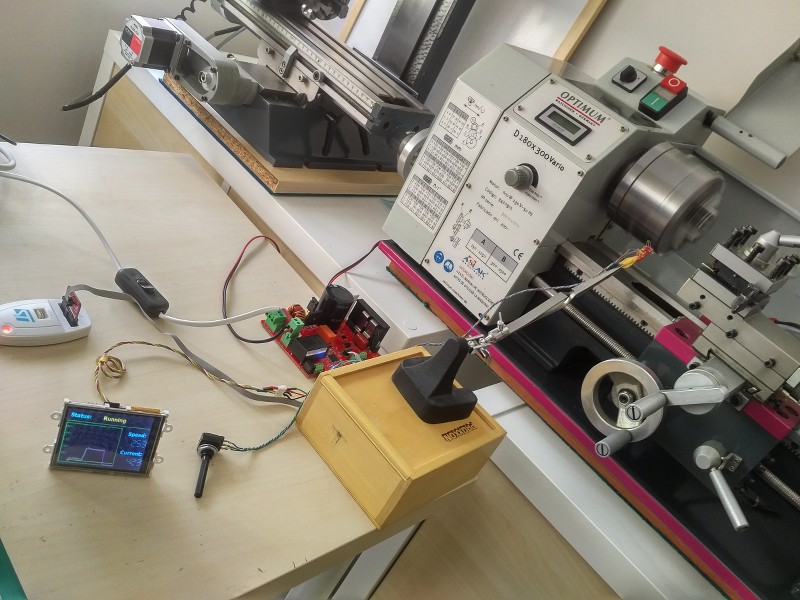 Diferencias entre velocidad estimada con el estimador matemático vs. velocidad medida con el tacómetro.
Diferencias entre velocidad estimada con el estimador matemático vs. velocidad medida con el tacómetro.- La velocidad estimada por el estimador matemático es la velocidad de giro del eje del motor.
- La velocidad medida por el tacómetro, es la velocidad de giro del husillo de la máquina, donde se monta el plato de garras.
Para regular la velocidad, se necesita la velocidad del motor, pero para mecanizar, se necesita la velocidad del husillo. La relación entre ambas velocidades es la relación de poleas o engranajes que usamos en cada momento.
El software que se ejecuta en el micro-controlador ARM Cortex M4 no tiene forma de saber qué relación de poleas estamos usando, por lo que no es posible pasar de una a otra, de forma automática.
(En la placa actual, existen unos “jumper” para indicarle a la placa el juego de poleas, pero esa funcionalidad se ha eliminado en esta versión).
Hay que aclarar que esta funcionalidad es totalmente opcional. Se activa cerrando un “jumper”. Si no se activa, el tiempo que se dedicaría a gestionar el tacómetro, se reinvierte en tiempo de ajuste del par y de velocidad. Como vemos, unas funcionalidades influyen en otras, al existir un solo micro-controlador para hacerlo todo.
De todas formas, este ARM Cortex M4 es un dispositivo muy potente, al que le sobre tiempo para ejecutar todas estas tareas si inmutarse.
Finalmente decir que el tacómetro SOLO tiene como función mostrar la velocidad real del husillo en la pantalla, pero nunca participa en la regulación de la velocidad de la máquina.
La razón es que el estimador matemático es mucho más rápido que un tacómetro convencional, siendo capaz de entregar un nuevo valor de velocidad estimada, en cada ciclo de programa, aunque éste sea de muchos mega hertzios. Los tacómetros basados en pulsos, por el contra, solo pueden ofrecer un valor nueva, cada decenas o cientos de mili segundos, lo que lleva a regulaciones mucho más pobres.
Descripción de las imágenes.Se muestra el entorno de prueba, destinado a ajustar la funcionalidad de tacómetro. como se ve, procuro mantener un entorno de trabajo limpio, ordenado y sencillo. Imprescindible para trabajar con profesionalidad.
En la imagen de detalle del plato:

se aprecia que se han colocado unos imanes de neodimio sobre él, con el fin de excitar a un sensor hall de pulsos.
El sensor hall está montado en la placa de color rojo.
Estos imanes son más grandes de los que recomiendo para un contaje preciso de los pulsos. En una etapa posterior usaré imanes de neodimio mucho más pequeños, de forma que cada uno cree un pulso de pendiente muy vertical, al pasar por delante del sensor Hall.
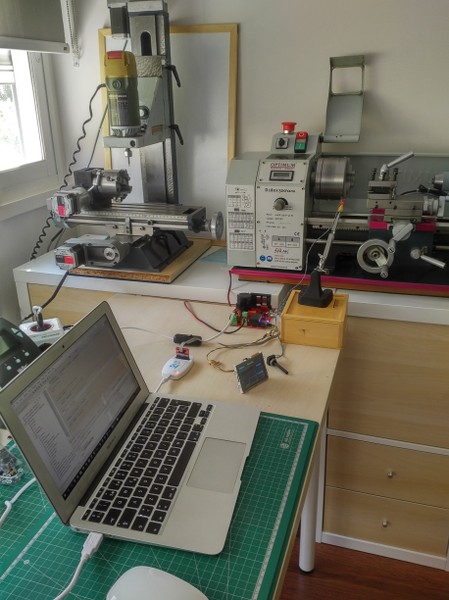
Vemos que la placa PCB con el sensor de pulsos está sujeto con una “tercera mano”, que compré en una tienda de artículos para joyeros, en el casco histórico de México DF. Uno nunca sabe dónde y cuándo acabará encontrando las cosas…

También se ve el computador, conectado a la placa de control de potencia, a través de un depurador de ST Microelectronics (aparatito blanco). A medida que vas probando cosas en modo "debug", vas modificando el software.
Finalmente, la pantalla TFT para mostrar los datos generados por el software que calcula la velocidad, y que posteriormente es enviado a la pantalla a través de la UART.


