Introducción:Durante varios años he mantenido el desarrollo de una exitosa placa de control para el motor de continua de las máquinas herramienta, ya que me resultaba realmente difícil mejorarla.
La placa tiene como fin la alimentación del motor de continua de máquinas herramienta, como el torno 180x300 vario, o las fresadoras BF16 y BF20. Su gran ventaja reside en que lleva a cabo un control total del par y de la velocidad del motor, ajustándolo miles de veces por segundo, para que se mantengan estos valores cuando la máquina comienza a eliminar viruta, o manteniendo un elevado par cuando gira a velocidades muy bajas.

Sin embargo, y a pesar de ello, he decidido desarrollar una nueva versión de esta placa de control de motor de continua.
Las razones son las siguientes:
Cada placa me lleva demasiadas horas de montaje, al emplear componentes discretos, en vez de tecnología SMD.
Ofrece muchas funcionalidades que realmente luego no suelen utilizarse, lo que complica el diseño y montaje de la placa.
Estos excesos encarecen la placa innecesariamente.
Además, quiero aprovechar para incluir alguna ventaja:
1. Incluir un único filtro EMC de diseño propio, dentro de la placa, en vez de usar filtros externos. De esta forma, no habrá que fabricar cables para interconectar las cosas.
2. Sustituir los dos micro-controladores de 8 bits conectados en bus, por un solo ARM Cortex Mx de 32 bits. De esta forma estandarizaré la plataforma de desarrollo en mis placas más grandes, lo que me facilitará su mantenimiento.
3. Desarrollo de nuevas pantallas display para mostrar los datos, con un tamaño mayor de textos y cifras, que faciliten la legibilidad. Estas pantallas se podrán emplear también en las placas de diseño previo, con una actualización de software.
4. Un profundo estudio de la distribución de los componentes SMD, junto con un menor número de componentes, ha permitido situarlos de forma que sean muy accesibles, para facilitar su montaje, mantenimiento y reparación.
5. Posibilidad de preconfigurar la placa para motores de unos 500-600 vatios o para 800-900 vatios, con solo cambiar un jumper.
Diseño conceptual y matemático del nuevo sistema de control de par y de velocidad:He actualizado el ensayo de diferentes máquinas herramienta, para determinar sus parámetros característicos.
En la imagen se ve el
ensayo para determinar la inductancia del motor original del torno 180x300 vario.
También se llevan a cabo ensayos de vacío y de cortocircuito para determinar el resto de parámetros del circuito equivalente.
Con los valores obtenidos, podremos progarmar en el micro-controlador ARM Cortex Mx, un
estimador matemático de la velocidad del motor, que me permita regular par y velocidad sin necesidad de gestionar un tacómetro.

He rediseñado el sistema de control que ejecutará en software, el micro-controlador ARM Cortex Mx, que consiste en dos reguladores Proporcional-Integral (PI) funcionando anidados.
En la imagen se muestra su diseño conceptual, el cual
se traducirá a software mediante transformadas en S (Transformada de Laplace) y posteriores Transformadas en Z (Transformada de Laurent).
 Diseño del hardware:
Diseño del hardware:Este es el boceto del prototipo de la nueva placa, dibujado en 3D por un software específico para el diseño de placas electrónicas:
Desarollo del software de control.Ya he migrado el software de control, desde los dos micro-controladores de 8 bits, al ARM Cortex Mx de 32 bts.
El sistema
regulará el par y la velocidad, unas 10.000 (diez mil) veces por segundo. Mucho más de lo que puede necesitar una máquina herramienta de este tamaño.
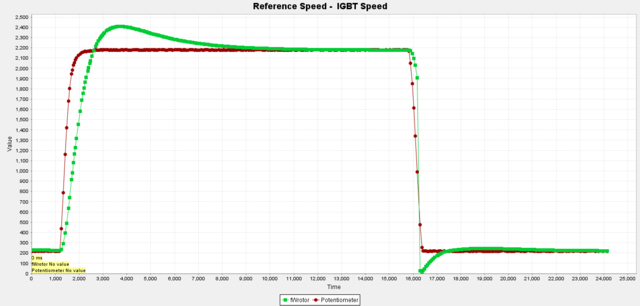
He llevado a cabo los primeros ajustes de los reguladores PI de par y velocidad.
Como puede verse en la imagen, en rojo se muestra el valor del potenciómetro de velocidad de la máquina-herramienta. En verde, se muestra cómo evoluciona la velocidad estimada por el software, a la que está girando el eje del motor. Se ve que hay una ligera sobreoscilación, que es necesaria para que la respuesta sea rápida. El sistema está casi ajustado en su totalidad.
 Pantallas LCD de gran tamaño.
Pantallas LCD de gran tamaño.También he empezado a desarrollar la nueva aplicación para los displays LCD, que muestren imágenes más grandes, y por tanto más claras.



